| 製作手順 | |
| 19 股関節 | |
 |
裏返した腰パーツ。 |
 |
不完全な部分にパテを盛ってきれいに仕上げます。 |
 |
胴、腰、足のパーツがそろったので、 バランスを見ながらモモの長さを決めます。 どの程度短くするかわからないので目安の線を何本も引いています。 |
 |
かなり短くなったモモパーツ。 |
 |
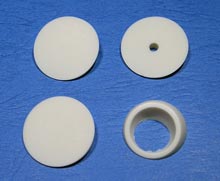
モーターツール旋盤で作ったパーツ。 シリコーンゴムとレジンキャストで2個に。 これが股関節になります。 |
 |
上の写真の片方をバキュームフォーム。 バキュームフォーム |
 |
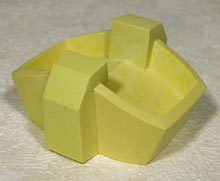
モモを上から見た写真。 ここにバキュームフォームパーツを埋め込みます。 |
 |
慎重にすり合わせて接着。 |
 |
余分なプラ板を削り落とした状態。 |
 |
上下逆ですが、 フリーポーズ仕様の関節のイメージ。 |
 |
気泡を埋めて、サフを吹いた状態。 楕円形で真正面がどこかわかりにくいので、 正面側(写真では上側)に小さな窪みを彫っています。 |
 |
モモパーツ完成。 |
 |
慎重に位置を決めてレジンキャストパーツを接着。 レジンキャストパーツの接着面の中央に、 小さく切った両面テープを貼り位置を微調整し、 位置が決まったらそのまま低粘度の瞬間接着剤で固定という手順。 |
 |
腰横パーツ接着。 反対側はおゆまるコピーの予定。 |
 |
スネ。 |
 |
それぞれ外側にヒレを接着。 |
 |
まだ接着できないので一部をセロハンテープで固定して、 立たせてみるとこんな感じ。 股関節の位置決めや、 このように立たせてバランスを見る場合、 前後左右からよく見るのが重要なので回転台を使っています。 回転台 |
| 20 頭 | |
 |
このあたりで頭を作り始めます。 複雑な形状のパーツを作る場合、 これまでは胴パーツを1段目、2段目と作ったように、 部分部分に分けていました。 しかし、頭に限ってはその手順では胴とのバランスが狂いやすく、 また、修整も面倒になってしまうので全体をまとめて作っています。 |
 |
ロボットの頭部のデザインはどれも複雑な形状です。 それを一気に作ろうとすると気が滅入るので平行して腕を作りながら、 パテを盛ったり削ったりを繰り返し、 「昨日よりは進んだな」くらいのペースで徐々に進めます。 |
 |
|
 |
とりあえず基本の形をほぼ出して、 そこから胴とのバランスを見ながら小さくしていきます。 |
 |
|
 |
普通ならこのまま頭を作り込むのですが、 このロボットは首がないと頭の形も決まらないので首を作ります。 バックパックと同様に胴にメンタムを塗ってパテで盛り、 首をムギュッと押し付けて固定。 |
 |
スキマにパテを盛ります。 これから作る腕とのバランスで修整することも考慮して多めにパテ盛り。 なんだかかなり後退した気も。 |
| 21 腕と肩 | |
 |
モーターツール旋盤で作った腕と上腕。 |
 |
モーターツール旋盤で作ってそれぞれ斜めに削ったパーツ。 |
 |
組み合わせると蛇腹状の肩パーツに。 両面テープで仮組みしているだけなのでまだ密着感はイマイチです。 |
 |
腕パーツ。 |
 |
パテを盛って四角っぽく形状修整。 |
 |
下から見た写真。 |
| 22 腰仕上げ | |
 |
腰横パーツのおゆまるコピー完了。 |
 |
胴と腰は3ミリの金属線を通してガッチリ固定する仕様なので、 ドリルの刃用の窪みを彫ります。 |
 |
モーターツールの先端ビット。 左は2.8ミリの金属刃タイプ(ピンバイスに固定)、右は5ミリの砥石タイプ。 ここでは左を使用。 パーツに目安の線を引いて慎重に彫ります。 |
 |
続けて胴パーツにも彫るのですが、 上下の窪みの位置がズレているかどうかは、 間に2.5ミリ真鍮球はさんで確認します。 |
 |
一気に彫らずにズレを修整しながら少しずつ彫ります。 |
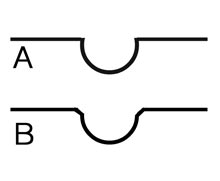 |
Aのままだとシリコーンゴム型が欠けやすかったり、 いろいろと不都合があるので、 先端ビットの写真の右の方を窪みに当ててクルクルと回して削り、 Bのようにします。 |
 |
彫った窪みに気泡があった場合は、 気泡にパテを詰めてから先が丸いポリ軸を窪みに差し込み、 クルクルと回すと埋まります。 写真はコトブキヤのご可動さま4に入っていた3ミリポリ軸。 |
 |
これは胴と腰を3ミリの金属線で固定する仕様ですが、 3ミリのポリ軸を使うと可動化します。 私は原型に穴をあけるのがイヤなのでこのような手順ですが、 気にならない人はドリルで直接穴をあけると位置決めや確認が楽です。 その場合は、シリコーン型作りの粘土埋め作業の際に、 穴に粘土を詰めて適当な深さにします。 |
 |
裏返した腰パーツ。 股間部分の前後をつなぐパーツを作ります。 |
 |
|
 |
やや大きめに削り出したパーツを乗せてみた状態。 |
 |
違う角度。 |
 |
パーツのすり合わせ作業には銅粉を使うと便利です。 まず銅粉を綿棒でこすりつけます。 |
 |
ギュッギュッと押し込みます。 |
 |
うまく合っていない部分に銅粉が多く付着するので、 そこを小ヤスリで削ります。 |
 |
すり合わせ終了。 |
 |
前後のラインがキレイにつながるように削ります。 |
 |
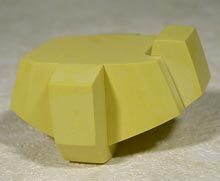
下から見た写真。 これで完成に見えますが、 このままではモモが入らないので加工します。 (理由は下の補足で説明します。) |
 |
モモとすり合わせながら、 股関節の可動範囲を潰さないようにゆとりを持って多めに削ります。 |
 |
違う角度。 |
 |
もう1枚。 |
 |
腰完成。 その6へ続く。 |
| 補足 | |
| 二次元のウソ | |
 |
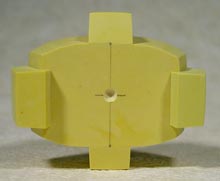
フルスクラッチの資料となるロボットの設定画やイラストは、 ほぼ100%実物を見て描かれているわけではありません。 そのため、立体化しようとすると、 辻褄が合わなかったり矛盾する部分があります。 それが顕著なのがモモと腰の幅です。 設定画ではモモは正面から描かれ、 腰は斜めに描かれているということを差し引いても、 多くの場合モモの幅の方が広いです。 そのままではモモに合わせると腰が大きくなりすぎ、 腰に合わせるとモモが貧弱になってしまいます。 で、どうするかと言うと写真のようにモモとモモの間を削ります。 こうすれば胴とモモどちらも妥協しないですみます。 |
 |
|